ros_interpreter.hh File Reference
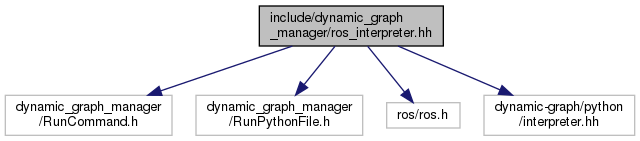
#include <dynamic_graph_manager/RunCommand.h>#include <dynamic_graph_manager/RunPythonFile.h>#include <ros/ros.h>#include <dynamic-graph/python/interpreter.hh>
Include dependency graph for ros_interpreter.hh:
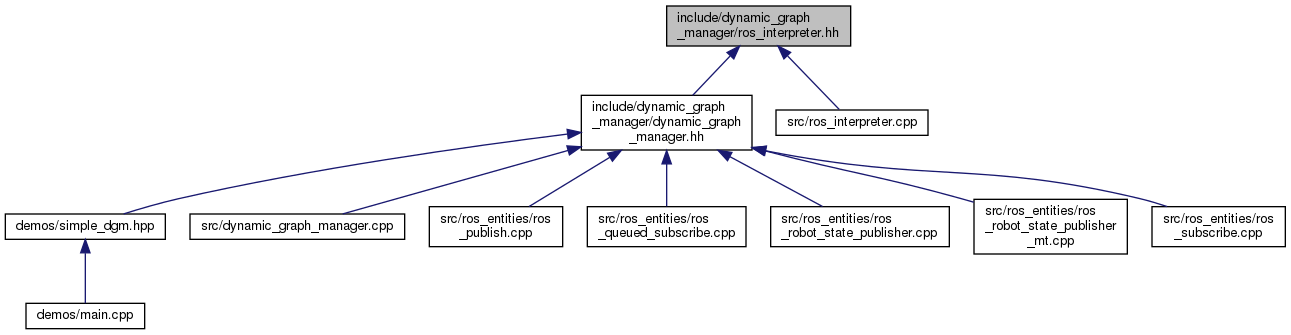
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamic_graph::RosPythonInterpreter |
| This class wraps the implementation of the runCommand service. More... | |
Namespaces | |
| dynamic_graph | |
| this is this package namespace in order to avoid naming conflict | |
Detailed Description
- License:
- License BSD-3-Clause
- Copyright
- Copyright (c) 2019, New York University and Max Planck Gesellschaft.
- Date
- 2019-05-22
This file declares a ros bridge on top of Python interpretor. It is used an asynchronuous communcation between the user and the controller.
