8/ Robot dashboard
8.1/ Creating a dashboard
In order to create a dash board just source you ros environment and run:
rqt
Then you will have this kind of window:
In the plugins tab you have the list of loadable plugins you want. Meaning all the ROS ecosystem at your disposal and on GUI.
Example:
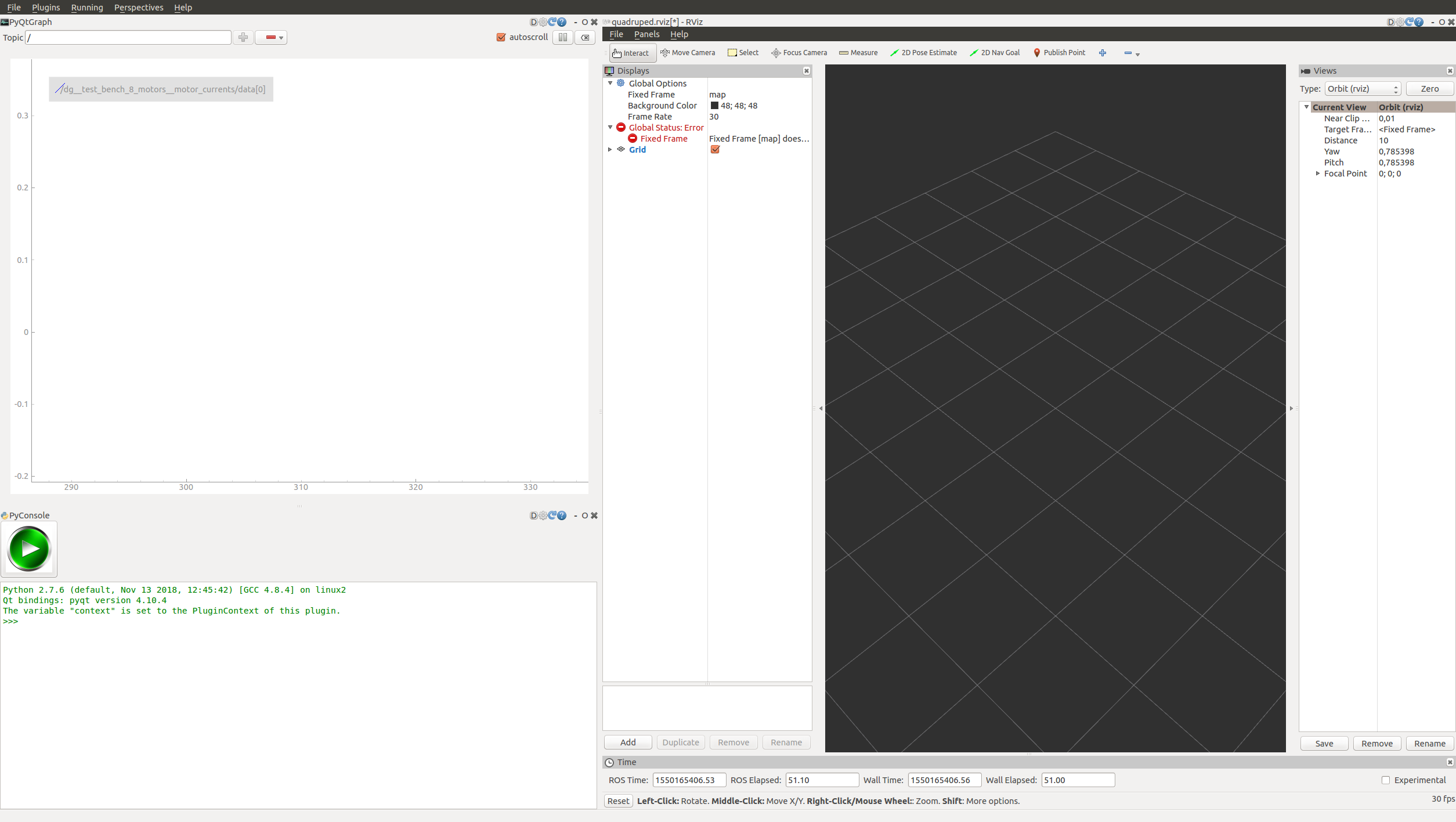
Enjoy!
8.2/ Launching the dashboard
In order to launch it you need:
- The rqt_dynamic_graph plugin from my fork though. There is a lot to do before this plugin is robust enough to be merge in the LAAS master. git clone --recursive https://github.com/MaximilienNaveau/rqt_dynamic_graph.git
- A dynamic_graph_manager main running: for simple testing you can run: rosrun dynamic_graph_manager demo_dynamic_graph_manager
- Run the dashboard from the robot_properties package of your choice: orroslaunch robot_properties_quadruped quadruped_dashboard.launchroslaunch robot_properties_teststand teststand_dashboard.launch
