4.3.1/ Download the scripts
Download the following package using the package manager:
This should clone the repository in "workspace/src/catkin/utilities/model_tools" from https://git-amd.tuebingen.mpg.de/amd-clmc/model_tools with the following output:
4.3.2/ Compile the package with catkin
This compilation will tell catkin where to find the python scripts the binaries depends on. In order to do so change directory to your catkin workspace and run:
4.3.3/ Run the conversion script
The conversion tools is located in model_tools/nodes/stl_to_obj. Though in order to run this tools you need to be in the active directory because the input path will local in order to makes things easy for the user. This is the reason why this binary is available through ros:
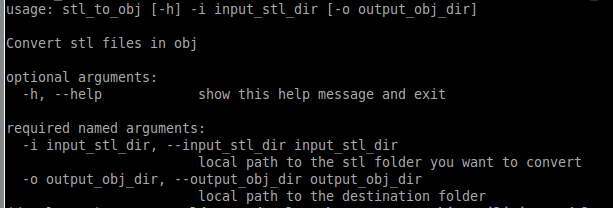
I strongly suggest you check the "–help" or "-h" output:
Last output known (28/02/2019) for the above instruction:
4.3.3/ Typical use.
Change directory to your [robot_name]_description/meshes or your robot_properties_[robot_name]/meshes where you saved the stl files in stl:
in the meshes folder you can typically run:
