|
momentumopt
|
|
momentumopt
|
#include <iomanip>#include <fstream>#include <yaml-cpp/yaml.h>#include <momentumopt/kinopt/KinematicsOptimizer.hpp>#include <momentumopt/utilities/OrientationUtils.hpp>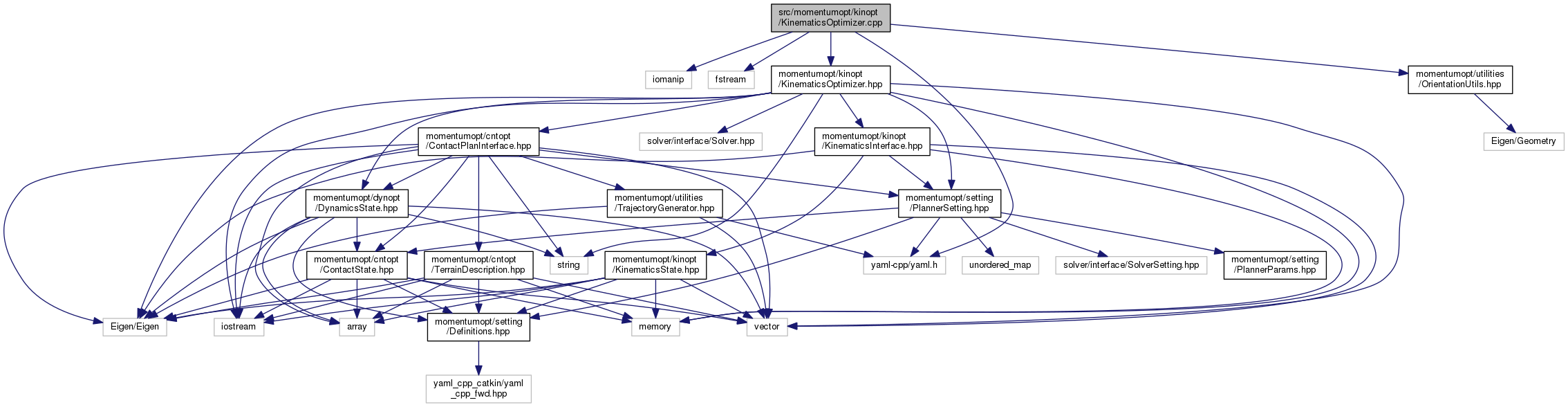
Namespaces | |
| momentumopt | |
 1.8.11
1.8.11 
