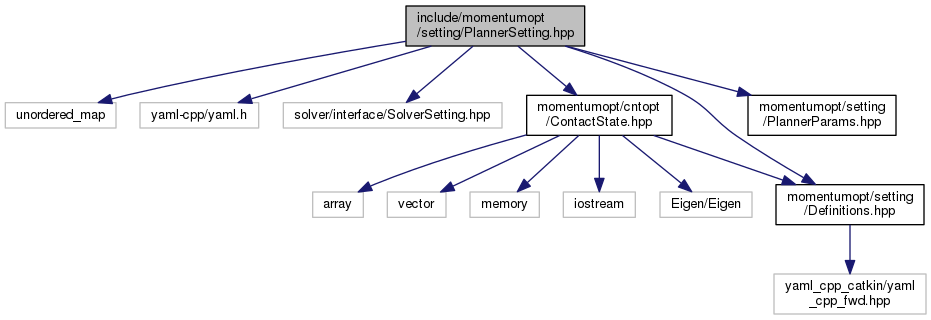
#include <unordered_map>
#include <yaml-cpp/yaml.h>
#include <solver/interface/SolverSetting.hpp>
#include <momentumopt/cntopt/ContactState.hpp>
#include <momentumopt/setting/Definitions.hpp>
#include <momentumopt/setting/PlannerParams.hpp>
Go to the source code of this file.
|
| enum | Heuristic { TrustRegion,
SoftConstraint,
TimeOptimization
} |
| |
- Author
- Brahayam Ponton (braha.nosp@m.yam..nosp@m.ponto.nosp@m.n@tu.nosp@m.ebing.nosp@m.en.m.nosp@m.pg.de)
- License:
- License BSD-3-Clause
- Copyright
- Copyright (c) 2019, New York University and Max Planck Gesellschaft.
- Date
- 2019-10-08

 1.8.11
1.8.11 
