|
solver
|
|
solver
|
#include <yaml-cpp/yaml.h>#include <solver/rt_optimizer/RtMutex.hpp>#include <solver/rt_optimizer/RtQPSolver.hpp>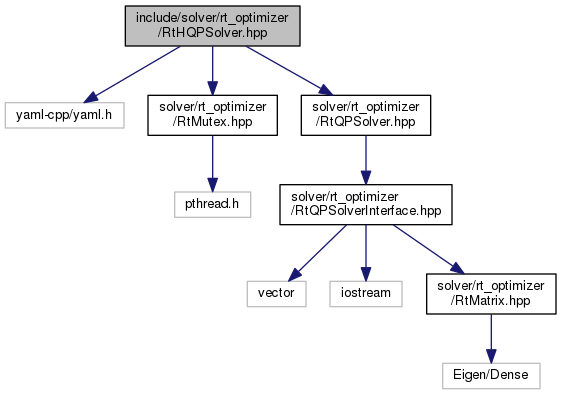
Go to the source code of this file.
Classes | |
| class | rt_solver::RtHQPSolver< All_A_Rows, Max_Num_Vars, Max_B_Rows > |
 1.8.11
1.8.11 
