|
|
ExitCode | exitcode () |
| | Generate an exit condition for the problem, either full or reduced precision.
|
| |
|
void | loadSolution () |
| | Loads back the solution of the node with best statistics.
|
| |
|
void | storeSolution () |
| | Stores the solution of the node with best statistics so far.
|
| |
|
void | initializeRootNode () |
| | Initialize the root node of BnB solver.
|
| |
|
int | selectNodeToExplore () |
| | Function to select the node to be explored.
|
| |
|
double | getProblemLowerBound () |
| | This function computes the lower bound out of the nodes explored so far.
|
| |
|
int | optimilityCheck (int node_id) |
| | Convergence check in BnB routine search.
|
| |
|
void | createBranches (int node_id) |
| | Function to create branches for the new variable to explore.
|
| |
|
void | updateNodeBounds (int node_id) |
| |
|
void | selectPartitionVariable (int &partition_id, double &partition_val) |
| | Function to select the variable to explore to refine the space search.
|
| |
|
void | updateProblemData (const Eigen::Ref< const Eigen::VectorXi > &bool_node_id) |
| | function to update problem data from node to explore
|
| |
|
OptimizationInfo & | getInfo () |
| |
|
InteriorPointSolver & | getSolver () |
| |
|
|
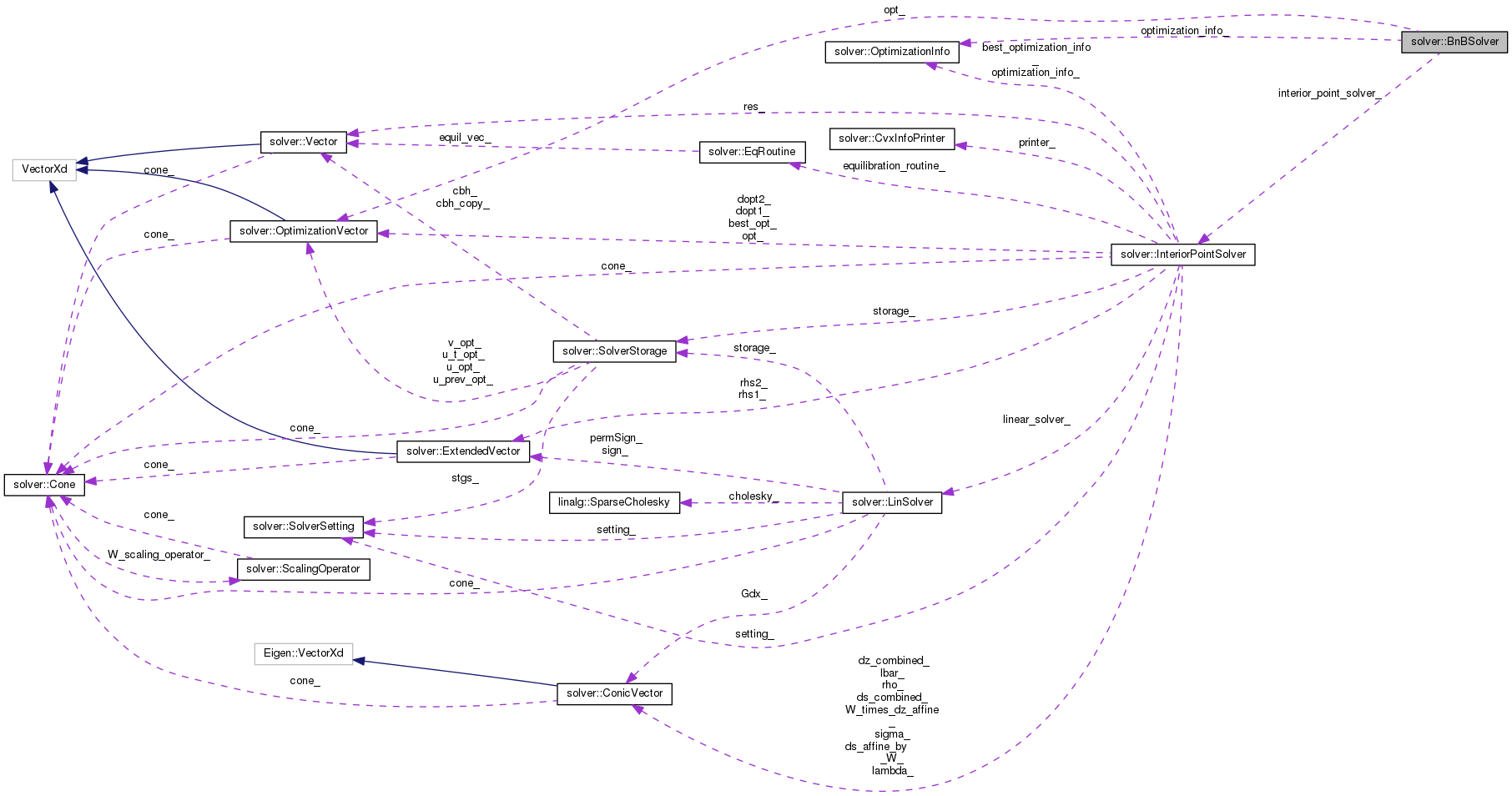
OptimizationInfo | optimization_info_ |
| |
|
InteriorPointSolver * | interior_point_solver_ |
| |
|
ExitCode | opt_status_ |
| |
|
OptimizationVector | opt_ |
| |
|
std::vector< node > | nodes_ |
| |
|
Eigen::VectorXi | binvars_ids_ |
| |
|
Eigen::VectorXi | binvars_vec_id_ |
| |
|
Eigen::MatrixXi | binvars_mat_id_ |
| |
|
int | nbin_vars_ |
| |
|
int | iteration_ |
| |
|
int | node_id_ |
| |
|
double | prob_upper_bound_ |
| |
|
double | prob_lower_bound_ |
| |
| ExitCode solver::BnBSolver::optimize |
( |
| ) |
|
Create branches for the problem
Updating problem bounds
Decision on exploration node
The documentation for this class was generated from the following files:
 1.8.11
1.8.11 
