|
solver
|
|
solver
|
Helper class to define an optimization vector, including primal and dual variables, and variables to render the optimization problem homogeneous. More...
#include <Cone.hpp>
Public Member Functions | |
| template<typename OtherDerived > | |
| OptimizationVector (const Eigen::MatrixBase< OtherDerived > &other) | |
| template<typename OtherDerived > | |
| OptimizationVector & | operator= (const Eigen::MatrixBase< OtherDerived > &other) |
| void | initialize (const Cone &cone) |
| OptimizationVector | operator+ (const OptimizationVector &rhs) const |
| Eigen::Ref< Eigen::VectorXd > | x () |
| Eigen::Ref< Eigen::VectorXd > | y () |
| Eigen::Ref< Eigen::VectorXd > | z () |
| Eigen::Ref< Eigen::VectorXd > | s () |
| Eigen::Ref< Eigen::VectorXd > | yz () |
| Eigen::Ref< Eigen::VectorXd > | yztau () |
| double & | tau () |
| double & | kappa () |
| const Eigen::Ref< const Eigen::VectorXd > | x () const |
| const Eigen::Ref< const Eigen::VectorXd > | y () const |
| const Eigen::Ref< const Eigen::VectorXd > | s () const |
| const Eigen::Ref< const Eigen::VectorXd > | z () const |
| const Eigen::Ref< const Eigen::VectorXd > | yz () const |
| const Eigen::Ref< const Eigen::VectorXd > | yztau () const |
| double | tau () const |
| double | kappa () const |
| Eigen::Ref< Eigen::VectorXd > | xyz () |
| Eigen::Ref< Eigen::VectorXd > | xyztau () |
| Eigen::Ref< Eigen::VectorXd > | zLpc () |
| Eigen::Ref< Eigen::VectorXd > | zSoc () |
| Eigen::Ref< Eigen::VectorXd > | zSoc (int id) |
| const Eigen::Ref< const Eigen::VectorXd > | xyz () const |
| const Eigen::Ref< const Eigen::VectorXd > | xyztau () const |
| const Eigen::Ref< const Eigen::VectorXd > | zLpc () const |
| const Eigen::Ref< const Eigen::VectorXd > | zSoc () const |
| const Eigen::Ref< const Eigen::VectorXd > | zSoc (int id) const |
Private Attributes | |
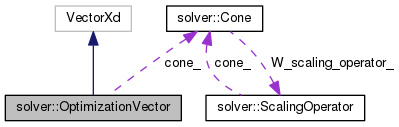
| const Cone * | cone_ |
Helper class to define an optimization vector, including primal and dual variables, and variables to render the optimization problem homogeneous.
 1.8.11
1.8.11 
