Public Member Functions | |
| DeviceSimulator (const std::string &input_name) | |
| DeviceSimulator is the constructor. More... | |
| ~DeviceSimulator () | |
| Destroy the DeviceSimulator object. | |
| virtual void | initialize (const YAML::Node ¶ms) |
| This method is hinerited from the Device class. More... | |
| virtual void | initialize_from_file (const std::string &yaml_file) |
| This method is hinerited from the Device class. More... | |
| virtual void | execute_graph () |
| This method is hinerited from the Device class. More... | |
 Public Member Functions inherited from dynamic_graph::Device Public Member Functions inherited from dynamic_graph::Device | |
| virtual const std::string & | getClassName (void) const |
| getClassName is an overloaded function from the class Entity. More... | |
| Device (const std::string &input_name) | |
| Device is the constructor. More... | |
| virtual | ~Device () |
| ~Device is a default destructor that might overloaded | |
| void | initialize_maps (const YAML::Node &sensors_and_controls) |
| parse_yaml_file fill in the internal maps for sensors and controls. | |
| virtual void | set_sensors_from_map (const VectorDGMap &sensors) |
| set_sensors_from_map is a parser that feed the map "sensors" with the hardware sensor readings. More... | |
| void | execute_graph_deprecated () |
| execute_graph is a fonction that execute the graph. More... | |
| virtual void | get_controls_to_map (VectorDGMap &motor_controls) |
| get_controls_to_map is a parser that feed the map "controls" with the output of the DynamicGraph. More... | |
Public Attributes | |
| DeviceOutSignalMap | simu_motor_controls_out_ |
| simu_motor_controls_out_ is the output motor control for each joint. More... | |
| DeviceInSignalMap | simu_sensors_in_ |
| simu_sensors_in_ is a map of device output signals. More... | |
| Public Attributes inherited from dynamic_graph::Device | |
| DeviceOutSignalMap | sensors_out_ |
| sensors_out_ is a map of device output signals. More... | |
| VectorDGMap | sensors_map_ |
| sensors_map_ is a map of dynamicgraph::Vector. More... | |
| DeviceInSignalMap | motor_controls_in_ |
| motor_control_in_ is the output motor control for each joint. More... | |
| VectorDGMap | motor_controls_map_ |
| motor_controls_map_ is a map of dynamicgraph::Vector. More... | |
Static Public Attributes | |
| static const std::string | CLASS_NAME |
| This is the name of the classe that is used to store the object in the dynamic graph. | |
| Static Public Attributes inherited from dynamic_graph::Device | |
| static const std::string | CLASS_NAME |
| This is the name of the classe that is used to store the object in the dynamic graph. | |
Additional Inherited Members | |
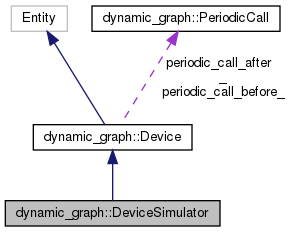
| Protected Attributes inherited from dynamic_graph::Device | |
| PeriodicCall | periodic_call_before_ |
| periodic_call_before_ handle the synchronous command call on the device between getting the sensor data and sending the commands. More... | |
| PeriodicCall | periodic_call_after_ |
| periodic_call_after_ handle the synchronous command call on the device between getting the sensor data and sending the commands. More... | |
| YAML::Node | params_ |
| params is a YAML node that allow the creation of a modular device | |
Constructor & Destructor Documentation
◆ DeviceSimulator()
| dynamic_graph::DeviceSimulator::DeviceSimulator | ( | const std::string & | input_name | ) |
DeviceSimulator is the constructor.
The name allow the DynamicGraph to identify the entity.
- Parameters
-
[in] name is the DynamicGraph identifyer.
Member Function Documentation
◆ execute_graph()
|
virtual |
This method is hinerited from the Device class.
"execute_graph" is the method that execute the graph.
In order it does:
- Copy the simulation input sensor into the output sensor signals
- Execute a first set of synchrounous commands.
- Execute the graph.
- Execute a second set of synchronous commands.
- Copy the control input into the simulation control output signals
Reimplemented from dynamic_graph::Device.
◆ initialize()
|
virtual |
This method is hinerited from the Device class.
"initialize" is the function that initialize the device from the YAML paramters.
- Parameters
-
params is the yaml file used to initialize the device
Reimplemented from dynamic_graph::Device.
◆ initialize_from_file()
|
virtual |
This method is hinerited from the Device class.
"initialize_from_file" is the function that initialize the device from a YAML file. It loads internally the file and then use the paramters to initialize itself using the "initialize" method.
- Parameters
-
params is the yaml file used to initialize the device
Reimplemented from dynamic_graph::Device.
Member Data Documentation
◆ simu_motor_controls_out_
| DeviceOutSignalMap dynamic_graph::DeviceSimulator::simu_motor_controls_out_ |
simu_motor_controls_out_ is the output motor control for each joint.
They are the simulated signals to be plugged to a simulator wrapped as an entity.
◆ simu_sensors_in_
| DeviceInSignalMap dynamic_graph::DeviceSimulator::simu_sensors_in_ |
simu_sensors_in_ is a map of device output signals.
They represent all the sensors belonging to the robot. Feeding these signals IS MANDATORY otherwise accessing this data will make the process crash.
The documentation for this class was generated from the following files:
- include/dynamic_graph_manager/device_simulator.hh
- src/device_simulator.cpp
