|
momentumopt
|
|
momentumopt
|
#include <solver_lqr/SolverLqr.hpp>#include <solver_lqr/OcpDescription.hpp>#include <momentumopt/dynopt/DynamicsState.hpp>#include <momentumopt/setting/PlannerSetting.hpp>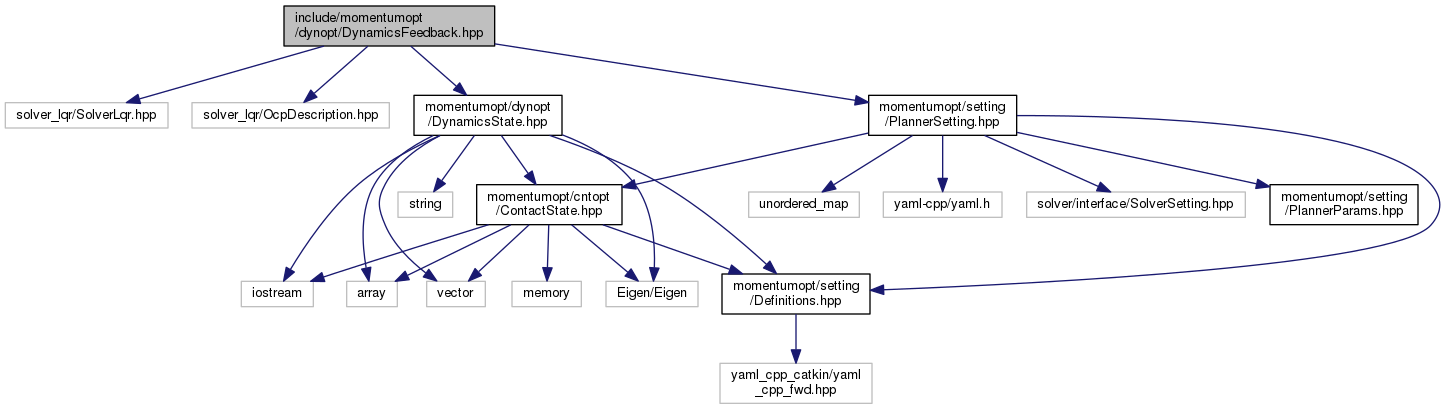
Go to the source code of this file.
Classes | |
| class | momentumopt::DynamicsFeedback |
| Class that implements the dynamic description of momentum dynamics as an optimal control problem, to be used by an LQR algorithm to derive a feedback sequence. More... | |
| class | momentumopt::DynamicsFeedbackWrapper |
Namespaces | |
| momentumopt | |
 1.8.11
1.8.11 
