|
momentumopt
|
|
momentumopt
|
Public Member Functions | |
| void | initialize (solverlqr::SolverLqrSetting &lqr_stg, const PlannerSetting &plan_stg) |
| void | optimize (const DynamicsState &ini_state, const DynamicsSequence &dynamics_sequence) |
| Eigen::MatrixXd | forceGain (int time_id) |
Private Attributes | |
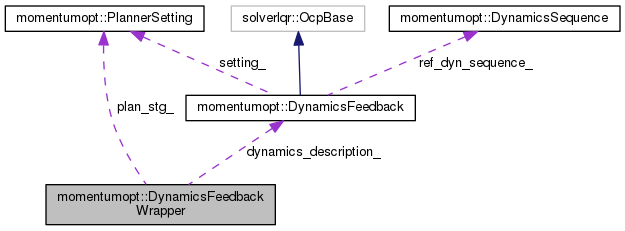
| const PlannerSetting * | plan_stg_ |
| solverlqr::SolverLqrSetting * | lqr_stg_ |
| DynamicsFeedback | dynamics_description_ |
| solverlqr::SolverLqr | dynamics_lqrsolver_ |
 1.8.11
1.8.11 
