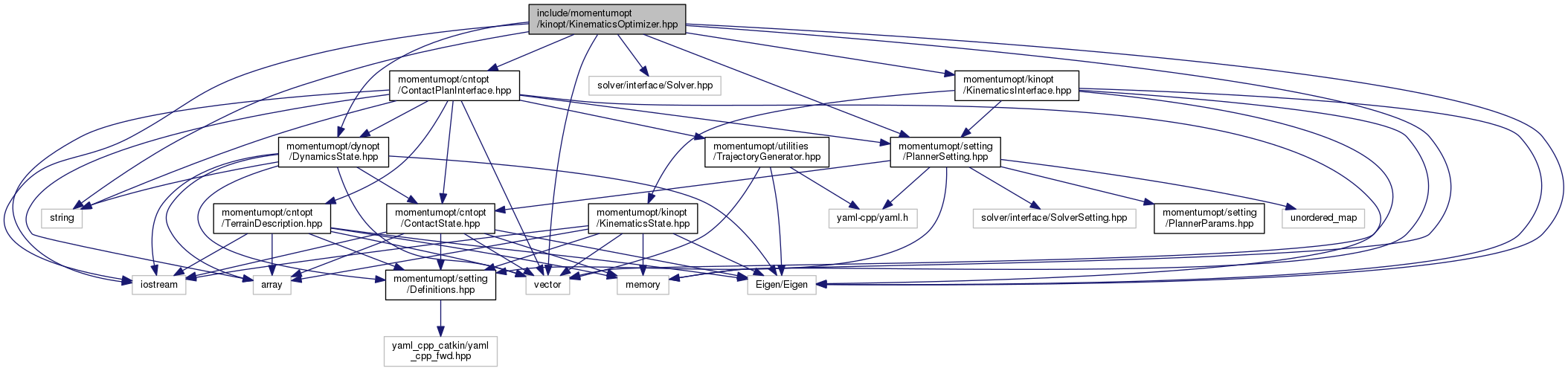
#include <string>
#include <vector>
#include <memory>
#include <iostream>
#include <Eigen/Eigen>
#include <solver/interface/Solver.hpp>
#include <momentumopt/dynopt/DynamicsState.hpp>
#include <momentumopt/setting/PlannerSetting.hpp>
#include <momentumopt/kinopt/KinematicsInterface.hpp>
#include <momentumopt/cntopt/ContactPlanInterface.hpp>
Go to the source code of this file.
- Author
- Brahayam Ponton (braha.nosp@m.yam..nosp@m.ponto.nosp@m.n@tu.nosp@m.ebing.nosp@m.en.m.nosp@m.pg.de)
- License:
- License BSD-3-Clause
- Copyright
- Copyright (c) 2019, New York University and Max Planck Gesellschaft.
- Date
- 2019-10-08
 1.8.11
1.8.11 
