|
momentumopt
|
|
momentumopt
|
#include <KinematicsOptimizer.hpp>
Public Member Functions | |
| KinematicsOptimizer () | |
| void | initialize (PlannerSetting &planner_setting, KinematicsInterface *kin_interface) |
| function to initialize and configure the optimization More... | |
| void | optimize (const DynamicsState &ini_state, ContactPlanInterface *contact_plan, DynamicsSequence &dyn_sequence, bool is_first_kinopt) |
| function to parse equations and objective into optimization problem and attempt to find a solution More... | |
| KinematicsSequence & | kinematicsSequence () |
| this function gives access to the optimized motion plan More... | |
| const KinematicsSequence & | kinematicsSequence () const |
Private Member Functions | |
| PlannerSetting & | getSetting () |
| helper function to replay a motion More... | |
| const PlannerSetting & | getSetting () const |
| void | initializePostureKinematicVariables () |
| function to initialize optimization variables: type [continuous or binary], guess value [if any], upper and lower bounds for the variable | |
| void | initializeTrajectoryKinematicVariables () |
| void | addVariableToModel (const solver::OptimizationVariable &opt_var, solver::Model &model, std::vector< solver::Var > &vars) |
| function to add each variable to the Model and assign a unique identifier to it, to be used by the optimizer to construct the problem More... | |
| void | saveSolution (solver::OptimizationVariable &opt_var) |
| functions that transfers optimal solution from model to helper class OptimizationVariable, and from helper class OptimizationVariable to dynamics sequence to be accessed by the user More... | |
| void | storeSolution (const DynamicsState &ini_state, DynamicsSequence &dyn_sequence) |
| void | optimizeTrajectory (const DynamicsState &ini_state, DynamicsSequence &dyn_sequence) |
| function that implements iterative inverse kinematics to track momentum, end-effector motions, by a robot with a given joint configuration More... | |
| void | optimizePosture (KinematicsState ¤t_state, const DynamicsState &desired_state, bool is_initial_state=false) |
| void | displayMotion (const DynamicsSequence &dyn_sequence) |
| void | updateEndeffectorTrajectories (DynamicsSequence &dyn_sequence) |
| function to update the tracking endeffector trajectories More... | |
| Eigen::Vector3d | quaternionToRotationVector (const Eigen::Quaternion< double > &q) const |
Private Attributes | |
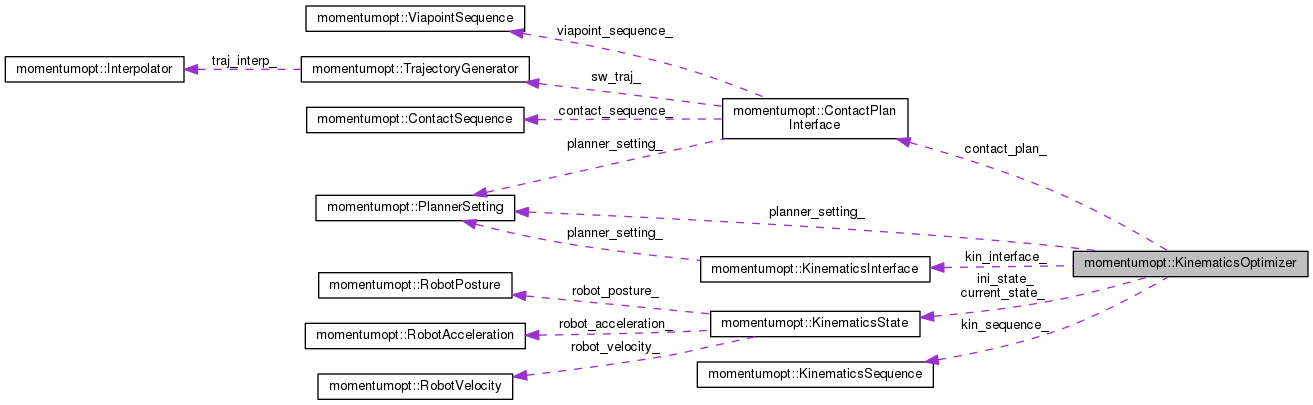
| PlannerSetting * | planner_setting_ |
| solver::Model | model_ |
| class that stores all information about the problem, interfaces between high level definition of the problem and its corresponding mathematical construction to solve it with a solver instance | |
| solver::LinExpr | lin_cons_ |
| solver::ExitCode | exitcode_ |
| std::vector< solver::Var > | vars_ |
| c++ vector containing all problem variables defined by the user. More... | |
| KinematicsState * | ini_state_ |
| configuration of the robot, including center of mass position, linear and angular momenta, end-effectors configurations: activation, position, orientation, joint configuration: positions, velocities and accelerations, for initial state, current state and desired state | |
| KinematicsState * | current_state_ |
| ContactPlanInterface * | contact_plan_ |
| helper class to store information about the contact plan, such as surfaces, position and orientation of a sequence of contacts | |
| KinematicsSequence | kin_sequence_ |
| kinematics sequence of kinematics states. More... | |
| KinematicsInterface * | kin_interface_ |
| char | variable_type_ |
| int | size_ |
| int | num_vars_ |
| std::array< solver::OptimizationVariable, Problem::n_endeffs_ > | eef_pos_ |
| std::array< solver::OptimizationVariable, Problem::n_endeffs_ > | eef_vel_ |
| std::array< solver::OptimizationVariable, Problem::n_endeffs_ > | eef_ang_vel_ |
| solver::OptimizationVariable | jnt_q_ |
| solver::OptimizationVariable | jnt_qd_ |
| solver::OptimizationVariable | jnt_qdd_ |
| solver::OptimizationVariable | total_qd_ |
| solver::OptimizationVariable | total_qdd_ |
| solver::OptimizationVariable | com_ |
| solver::OptimizationVariable | comd_ |
| solver::OptimizationVariable | lmom_ |
| solver::OptimizationVariable | amom_ |
| solver::OptimizationVariable | base_position_ |
| solver::OptimizationVariable | base_ang_vel_ |
| solver::OptimizationVariable | slack_vars_ |
| solver::OptimizationVariable::OptVector | solution_ |
| solver::OptimizationVariable::OptMatrix | mat_guess_ |
| solver::OptimizationVariable::OptMatrix | mat_lb_ |
| solver::OptimizationVariable::OptMatrix | mat_ub_ |
| std::array< Eigen::Vector3d, Problem::n_endeffs_ > | desired_eff_velocity_ |
| Eigen::Vector3d | desired_com_velocity_ |
| Eigen::Vector3d | desired_lmom_velocity_ |
| Eigen::Vector3d | desired_amom_velocity_ |
main class of the kinematic optimization problem
|
inline |
default class constructor and destructor
|
private |
function to add each variable to the Model and assign a unique identifier to it, to be used by the optimizer to construct the problem
| [in] | opt_var | helper optimization variable for model predictive control |
| [in] | model | instance of solver interface to collect constraints, objective and solve problem |
| [in] | vars | vector of optimization variables |
|
private |
helper function to display a kinematic motion
|
inlineprivate |
helper function to replay a motion
| [in] | PlannerSetting | setting of planner configuration variables |
| [in] | kin_interface | implementation of robot specific functions needed by the optimizer |
| [in] | load_file | file where the kinematic parameters have been stored function to load a kinematic solution from a file and fill a sequence with it |
| [in] | load_file | name of configuration file from where to load the solution |
Getter and setter methods for getting the planner variables
| void momentumopt::KinematicsOptimizer::initialize | ( | PlannerSetting & | planner_setting, |
| KinematicsInterface * | kin_interface | ||
| ) |
function to initialize and configure the optimization
| [in] | PlannerSetting | setting of planner configuration variables |
| [in] | kin_interface | implementation of robot specific functions needed by the optimizer |
|
inline |
this function gives access to the optimized motion plan
| void momentumopt::KinematicsOptimizer::optimize | ( | const DynamicsState & | ini_state, |
| ContactPlanInterface * | contact_plan, | ||
| DynamicsSequence & | dyn_sequence, | ||
| bool | is_first_kinopt | ||
| ) |
function to parse equations and objective into optimization problem and attempt to find a solution
| [in] | ini_state | initial state of the robot |
| [in] | contact_plan | container of contact sequence to be used for dynamics planning |
| [in] | dyn_sequence | dynamics sequence to be used as momentum tracking reference |
|
private |
function that implements iterative inverse kinematics to track momentum, end-effector motions, by a robot with a given joint configuration
|
private |
functions that transfers optimal solution from model to helper class OptimizationVariable, and from helper class OptimizationVariable to dynamics sequence to be accessed by the user
| [in] | opt_var | helper optimization variable for model predictive control |
|
private |
function to update the tracking endeffector trajectories
| [in] | dyn_sequence | dynamics sequence to be used as momentum tracking reference |
|
private |
helper optimization variables for the optimization problem
|
private |
exit code of the optimization problem
|
private |
implementation of robot specific functions needed by the optimizer
|
private |
kinematics sequence of kinematics states.
This is the main interface between the user and the planner. The user can find in this variable all the optimization results coming from the kinematics optimizer
|
private |
helper variables to construct linear and quadratic expressions
|
private |
Variables required for optimization
|
private |
helper integer variables for the optimization problem
|
private |
helper matrices and vectors for the optimization problem
|
private |
type for optimization variable: continuous 'C' or binary 'B'
|
private |
c++ vector containing all problem variables defined by the user.
Does not include extra variables required to write the problem in standard conic form.
 1.8.11
1.8.11 
