|
momentumopt
|
|
momentumopt
|
#include <array>#include <vector>#include <memory>#include <iostream>#include <Eigen/Eigen>#include <momentumopt/setting/Definitions.hpp>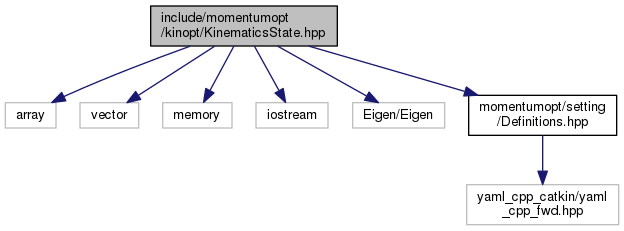
Go to the source code of this file.
Classes | |
| class | momentumopt::RobotPosture |
| class | momentumopt::RobotVelocity |
| class | momentumopt::RobotAcceleration |
| class | momentumopt::KinematicsState |
| This class is a container for all variables required to define a kinematics state: joint posture, joint velocities and accelerations, endeffector poses and momentum. More... | |
| class | momentumopt::KinematicsSequence |
| This class is a container for a sequence of kinematic states. More... | |
Namespaces | |
| momentumopt | |
 1.8.11
1.8.11 
