solver_lqr
Main Page
Related Pages
Classes
Files
File List
Functions
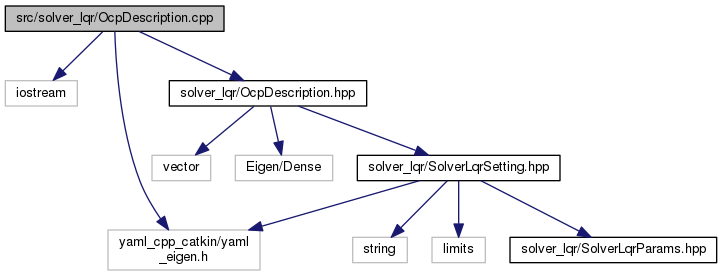
OcpDescription.cpp File Reference
#include <iostream>
#include <yaml_cpp_catkin/yaml_eigen.h>
#include <
solver_lqr/OcpDescription.hpp
>
Include dependency graph for OcpDescription.cpp:
Functions
StateBase
solverlqr::operator*
(double scalar, const StateBase &rhs)
StateBase
solverlqr::operator-
(const StateBase &lhs, const StateBase &rhs)
ControlBase
solverlqr::operator*
(double lhs_scalar, const ControlBase &rhs)
ControlSequence
solverlqr::operator*
(double lhs_scalar, const ControlSequence &rhs)
Detailed Description
Author
Brahayam Ponton (
braha
.nosp@m.
yam.
.nosp@m.
ponto
.nosp@m.
n@tu
.nosp@m.
ebing
.nosp@m.
en.m
.nosp@m.
pg.de
)
License:
License BSD-3-Clause
Copyright
Copyright (c) 2019, New York University and Max Planck Gesellschaft.
Date
2019-10-07
src
solver_lqr
OcpDescription.cpp
Generated by
1.8.11
 1.8.11
1.8.11 
