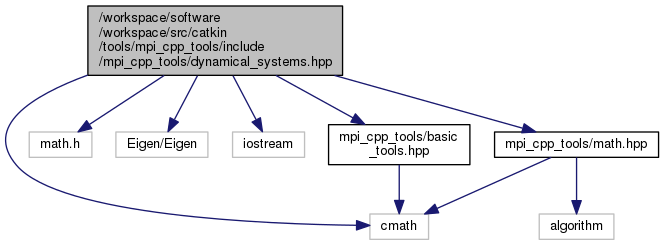
#include <cmath>
#include <math.h>
#include <Eigen/Eigen>
#include <iostream>
#include "mpi_cpp_tools/basic_tools.hpp"
#include "mpi_cpp_tools/math.hpp"
Go to the source code of this file.
|
| double | mct::find_max_admissible_acceleration (const double &initial_velocity, const double &initial_position, const double &max_velocity, const double &max_position, const mct::NonnegDouble &abs_jerk_limit, const mct::NonnegDouble &abs_acceleration_limit) |
| |
|
double | mct::find_min_admissible_acceleration (const double &initial_velocity, const double &initial_position, const double &min_velocity, const double &min_position, const mct::NonnegDouble &abs_jerk_limit, const mct::NonnegDouble &abs_acceleration_limit) |
| |
- Author
- Manuel Wuthrich License BSD-3-Clause
- Copyright
- Copyright (c) 2019, New York University and Max Planck Gesellschaft.
- Date
- 2019-08-05
| double mct::find_max_admissible_acceleration |
( |
const double & |
initial_velocity, |
|
|
const double & |
initial_position, |
|
|
const double & |
max_velocity, |
|
|
const double & |
max_position, |
|
|
const mct::NonnegDouble & |
abs_jerk_limit, |
|
|
const mct::NonnegDouble & |
abs_acceleration_limit |
|
) |
| |
- Todo:
- : not quite sure what is the right thing to do here
 1.8.11
1.8.11 
