|
|
OcpBase & | getOcp () |
| |
|
const OcpBase & | getOcp () const |
| |
|
const SolverLqrSetting & | getLqrSetting () const |
| |
|
Eigen::MatrixXd | tensorContraction (const Eigen::VectorXd &vz, const std::vector< Eigen::MatrixXd > &fzz) |
| |
|
void | findConstrainedControls (int time_id, const Eigen::MatrixXd &chol_hessian, const Eigen::VectorXd &gradient) |
| |
|
|
Eigen::VectorXd | V_ |
| |
|
Eigen::Vector2d | dV_ |
| |
|
Eigen::VectorXd | Qu_ |
| |
|
Eigen::VectorXd | Qx_ |
| |
|
Eigen::MatrixXd | Qxx_ |
| |
|
Eigen::MatrixXd | VxxR_ |
| |
|
Eigen::MatrixXd | Qxu_ |
| |
|
Eigen::MatrixXd | QxuR_ |
| |
|
Eigen::MatrixXd | Quu_ |
| |
|
Eigen::MatrixXd | QuuR_ |
| |
|
std::vector< Eigen::VectorXd > | Vx_ |
| |
|
std::vector< Eigen::VectorXd > | Vxh_ |
| |
|
std::vector< Eigen::MatrixXd > | Vxx_ |
| |
|
std::vector< Eigen::MatrixXd > | Vxxh_ |
| |
|
std::vector< Eigen::MatrixXd > | Vxhxh_ |
| |
|
solver::Model | model_ |
| |
|
solver::LinExpr | lin_expr_ |
| |
|
std::vector< solver::Var > | vars_ |
| |
|
solver::DCPQuadExpr | quad_expr_ |
| |
|
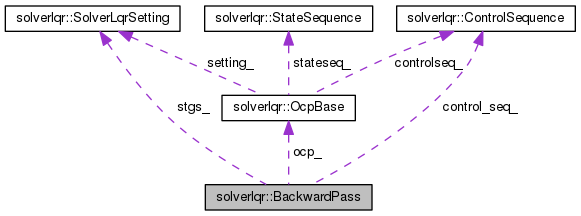
OcpBase * | ocp_ |
| |
|
ControlSequence | control_seq_ |
| |
|
const SolverLqrSetting * | stgs_ |
| |
|
Eigen::LLT< Eigen::MatrixXd > | llt_ |
| |
|
bool | diverge_flag_ |
| |
|
bool | is_initialized_ |
| |
|
int | diverge_iteration_ |
| |
|
int | tdim_ |
| |
|
int | xdim_ |
| |
|
int | udim_ |
| |
The documentation for this class was generated from the following files:
 1.8.11
1.8.11 
