|
solver_lqr
|
|
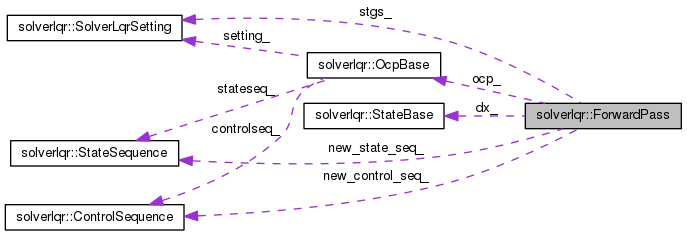
solver_lqr
|
Public Member Functions | |
| void | initialize (OcpBase *ocp, const SolverLqrSetting &stgs) |
| void | applyController (const StateSequence &nom_state_seq, const ControlSequence &nom_control_seq) |
| const double & | newCost () const |
| const bool & | hasDiverged () const |
| const double & | timestepCost (int time_id) const |
| StateSequence & | stateSeq () |
| ControlSequence & | controlSeq () |
| const StateSequence & | stateSeq () const |
| const ControlSequence & | controlSeq () const |
Private Member Functions | |
| OcpBase & | getOcp () |
| const OcpBase & | getOcp () const |
| const SolverLqrSetting & | getLqrSetting () const |
Private Attributes | |
| OcpBase * | ocp_ |
| const SolverLqrSetting * | stgs_ |
| StateBase | dx_ |
| StateSequence | new_state_seq_ |
| ControlSequence | new_control_seq_ |
| double | new_cost_ |
| bool | has_diverged_ |
| Eigen::VectorXd | timestep_cost_ |
 1.8.11
1.8.11 
