|
solver_lqr
|
|
solver_lqr
|
Optimal Control Problem Description Class. More...
#include <OcpDescription.hpp>
Public Member Functions | |
| void | initialize (const SolverLqrSetting &setting) |
| const double & | dt () const |
| const int & | tdim () const |
| const int & | xdim () const |
| const int & | udim () const |
| StateSequence & | stateSeq () |
| ControlSequence & | controlSeq () |
| const StateSequence & | stateSeq () const |
| const ControlSequence & | controlSeq () const |
| const SolverLqrSetting & | getLqrSetting () const |
| virtual void | configure (const YAML::Node &user_parameters)=0 |
| virtual Eigen::MatrixXd | processNoiseFilter (int time_id) const |
| virtual Eigen::MatrixXd | measurementNoiseFilter (int time_id) const |
| virtual StateBase | dynamics (const StateBase &state, const ControlBase &control, int time_id)=0 |
| void | internal_dynamics (const StateBase &state, const ControlBase &control, StateBase &new_state, int time_id) |
| virtual double | objective (const StateBase &state, const ControlBase &control, int time_id, bool is_final_timestep)=0 |
Private Attributes | |
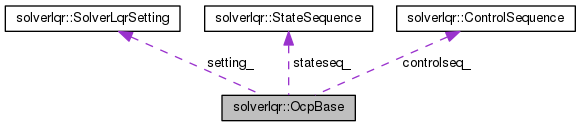
| StateSequence | stateseq_ |
| ControlSequence | controlseq_ |
| const SolverLqrSetting * | setting_ |
Friends | |
| class | Estimator |
| class | ForwardPass |
| class | BackwardPass |
| class | FiniteDifferences |
Optimal Control Problem Description Class.
 1.8.11
1.8.11 
